Assembly Sequence For a Medical Nanorobot
##Table of Contents
- What the medical nanorobot would look like
- The medical nanobot explained (Shell, motion and sensing)
- Assembly of the shell
- Assembly of the motors
- References
What the medical nanorobot would look like
Figure 1. A soma very similar to one of an Amoeba

inspired by image from https://en.wikipedia.org/wiki/File:Amoeba_proteus_with_many_pseudopodia.jpg
{kind=link}
Figure 2. Cross section of the nanorobot
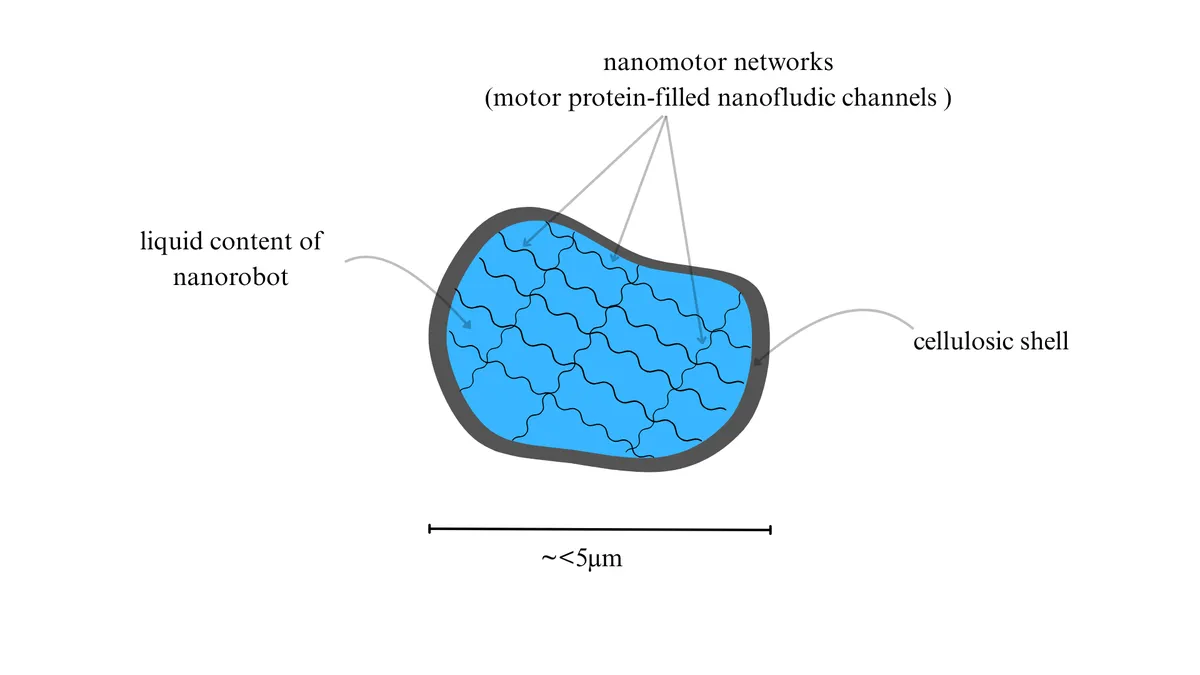
The medical nanobot explained (Shell, motion and sensing)
Its exterior is made of a cellulosic material assembled into a shell structure. Within that shell are intricate nanofluidic channels filled with motor proteins, along with inlet-outlet accessories for ATP input to power them. When activated, these motor proteins inside their nanocavities give the greater cellulosic shell motility and the ability to operate other facilities: therapeutic storage and release tanks, mechanical grippers for cell and organelle manipulation.
The surface also carries molecular sensors, structures that undergo conformational changes, with that change propagated through the nanobot's body via the mechanical behaviour of the motor proteins.
Its motion mirrors that of an amoeba[2]:
- A flexible membrane is pushed by internal pressure, causing pseudopodia[1] ("false feet") to extend outward.
- The pseudopodia attach to surfaces via adhesion elements, such as integrin proteins, or by hardening.
- Once anchored, a motor at the rear contracts, pushing the liquid contents of the cell body toward the front and producing net forward motion.
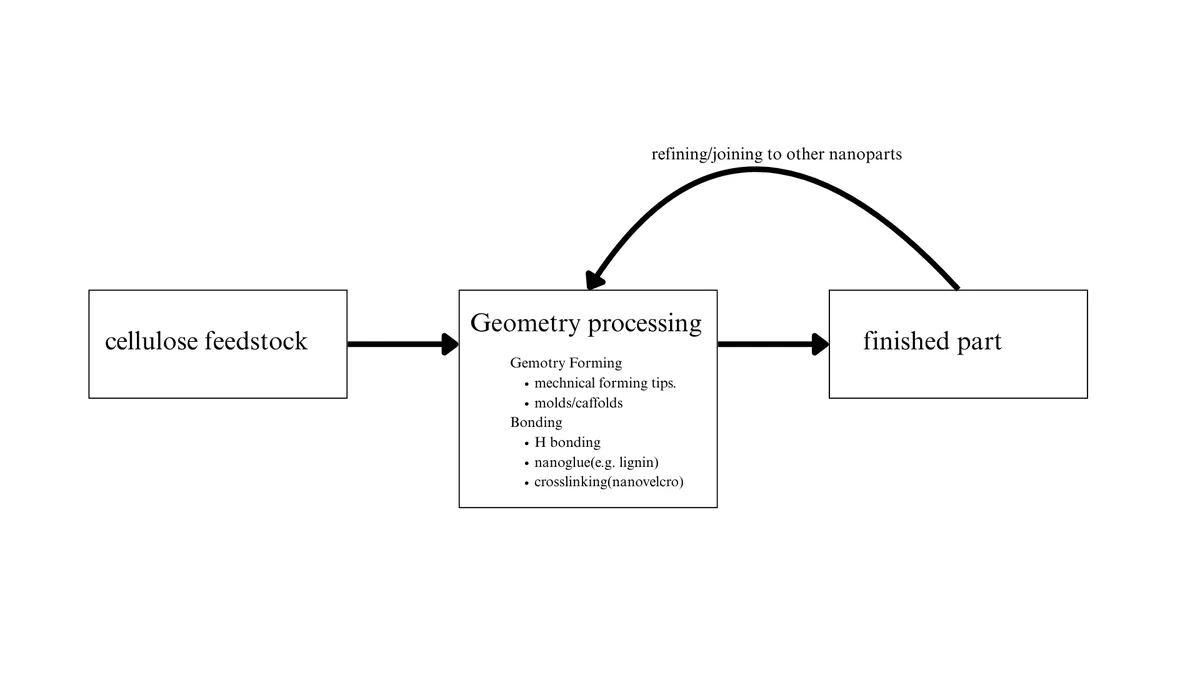
Assembly of the shell
- Cellulose manufacturing. Glucose feedstock is introduced nanofluidically into a cavity containing cellulose synthase enzymes, which polymerise the glucose units into cellulose strands.
- Assembly tools. The manufactured strands are deposited onto a surface for tip-based assembly into a 3D structure, or deposited into scaffolds and molds to template a greater 3D shape.
- Bonding. Bonding occurs via natural hydrogen bonds between cellulose OH groups, molecular glue such as lignin (as in plant cells), or nanovelcro[3], essentially crosslinking pillars together.
- Finished nanopart. The completed nanopart is removed and taken to the next stage for refinement or joining to other nanoparts.
A single 2D sheet produced by this process should achieve a maximum thickness of under 100 nm.
Assembly of the motors
- Tubulin-kinesin or actin-myosin proteins are fabricated separately.
- They are dextrously and fluidically placed into the nanochannels of the cellulosic shell.
- Covers are sealed over the motor elements in a chamber, leaving only an inlet for ATP input and ADP recycling.
References:
- Pseudopodia: https://en.wikipedia.org/wiki/Pseudopodia#Morphology
- movie of amoeba moving: https://youtube.com/shorts/Ad60kWHFKqs?si=nVUNgE7tUs4n91CW
- Nanovelcro: https://machine-phase.blogspot.com/2007/03/trying-to-model-nano-velcro.html